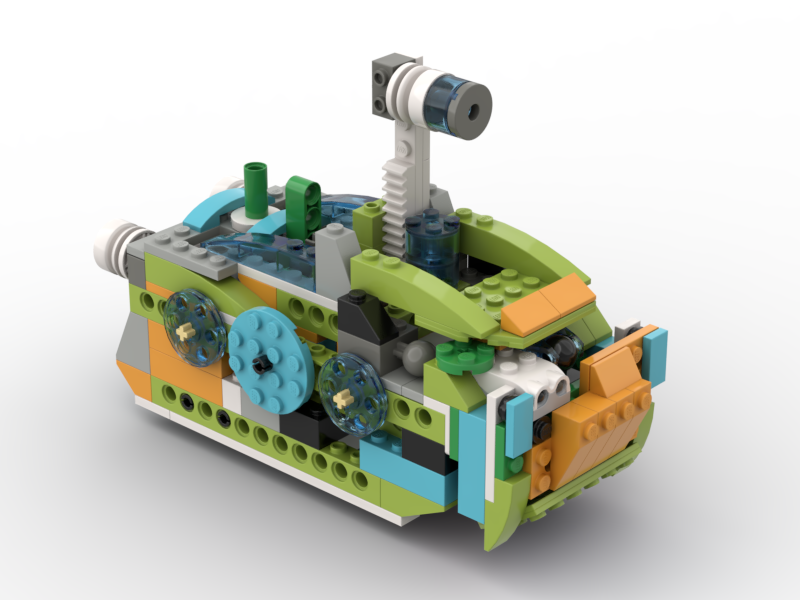
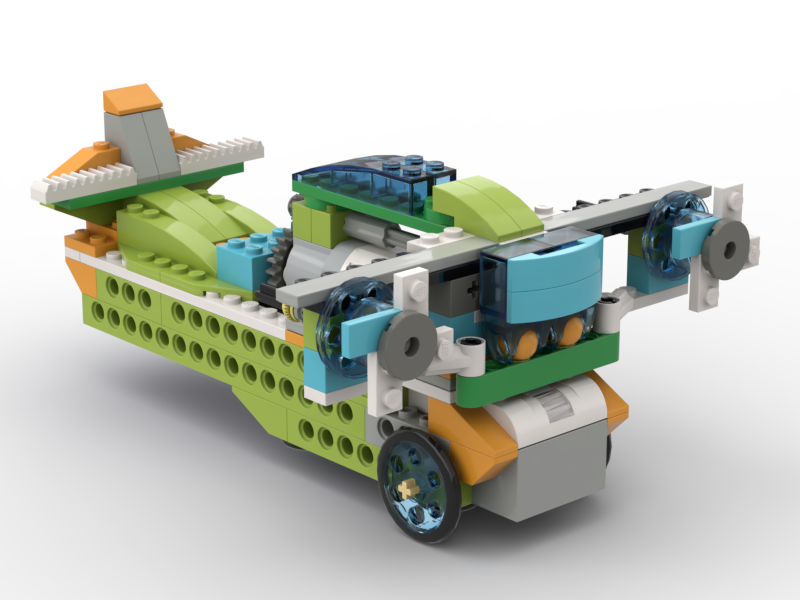
В свою очередь занятия по робототехнике строятся вокруг изучения моделей роботов, сконструированных на той или иной материальной базе. Исторически так сложилось, что одной из самых популярных платформ для изучения робототехники являются специализированные конструкторы Lego Education. На текущий момент они представлены тремя сериями – Lego Wedo 2.0, Lego Spike Prime и Lego Mindstorms EV3.